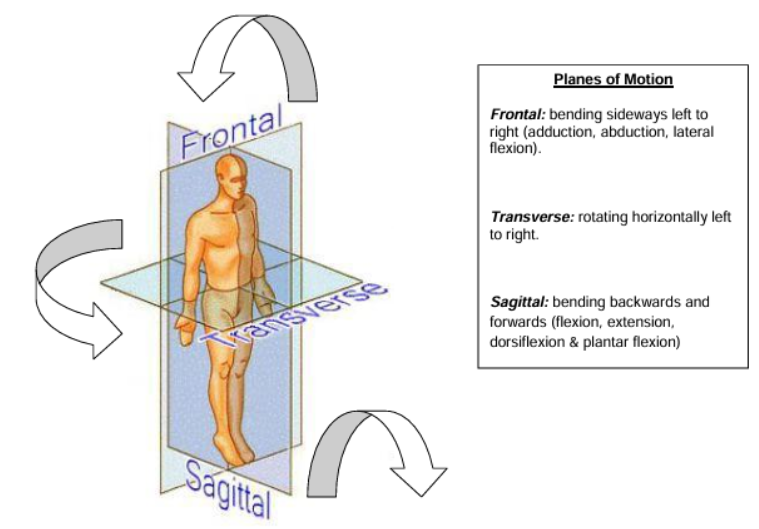
At first sight running appears to be a very simple form of locomotion involving movement in the sagittal plane however in terms of what is happening within the joints it is far more complex than that and involves movement in all three planes (sagittal, frontal and transverse). In addition to propelling your body forward you have to stabilize various joints to enable the muscles to exert the required amount of force. Forward propulsion is the result of the legs sending forces through to the ground. The arms do not directly apply any propulsive force so why do we use them, how do we use them and what is their actual role? To answer these questions let’s first take a look at what happens in the lumbo-pelvic-hip region during running.
Running can be seen as having three phases;
- Stance phase – which is divided into contact, mid stance and propulsion.
- Swing phase – which is divided into follow through, forward swing and foot decent.
- Flight phase – which occurs between propulsion of the stance leg and contact of the swinging leg.
(Yout may come across different terms to describe these phases).
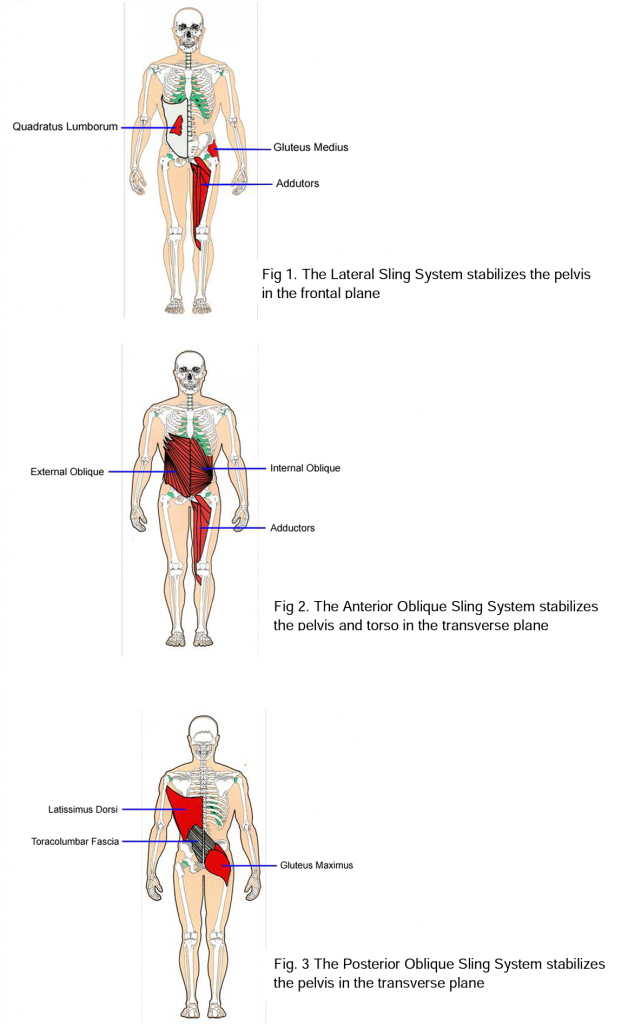
During running the pelvis moves in all three planes and in order to control these movements they have to be countered to ensure the pelvis is stale. Movement of the pelvis in the sagittal plane is controlled (stabilized) primarily by the qluteus maximus, hamstrings and lumbar erector spinae posteriorly and the iliopsoas, quadriceps and lower rectus abdominis anteriorly. Movement of the pelvis in the frontal plane is controlled primarily by muscles of the lateral sling system (fig.1) which are the stance leg adductors and gluteus medius and the contralateral (opposite side) quadratus lumborum. Rotational stability i.e. movement in the transverse plan, is produced/controlled by two further subsystems; the anterior oblique system (fig.2) which comprises the adductors, internal obliques and contralateral external obliques and the posterior oblique system (fig. 3) which comprises the gluteus maximus, thoracolumbar fascia and the contralateral latissimus dorsi.
When running not only do the arms assist with maintaining balance but they counter the rotational forces through the pelvis. This stops the pelvis from over rotating and therefore assists with the delivery of power through to the ground during propulsion. Without this counter force either the pelvis would over rotate or it would be difficult to deliver sufficient power to run fast thus forcing you to run at a pace slow enough to prevent you falling over. This can be demonstrated easily in two ways; firstly by running without the use of your arms and, if you can, running with your arms working in the opposite way to how they currently do i.e. right arm and leg forward at the same time, left arm and leg forwards at the same time etc.
As the left leg goes forwards there is forward (transverses) rotation of the left hip and shoulder as well as the spine and head, rotating the torso to the right. The reverse is true when the right leg goes forward. If these forces were not controlled there would be excessive motion in the transverse plane, the head would rotate left to right and the line of progression (the direction you run) would not be straight.
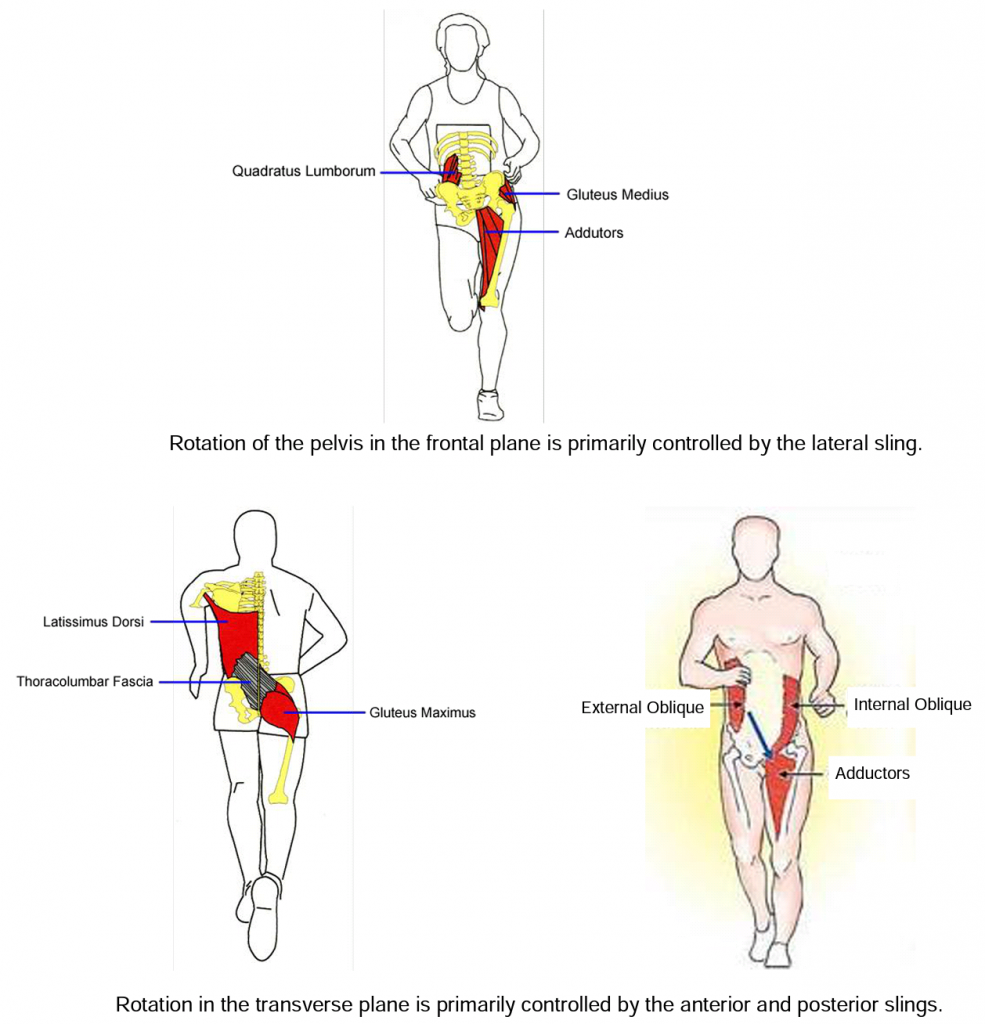
As the right leg goes back the contraction of the right gluteus maximus and left latissimus dorsi pull on the thoracolumbar fascia. This stabilizes the pelvis and draws the left arm backwards which prevents the left shoulder from moving forwards excessively and in so doing keeps the torso and head straight (Posterior Oblique System).
When the left leg is on the ground, contraction of the left hip adductors and internal obliques and right external obliques assist with rotating the torso to the left to counter the rotation to the right that occurred as the left leg moves forwards. This helps keep the torso facing forwards (Anterior Oblique System).
Arm movement should be in proportion to stride length and the speed at which you run i.e. the faster you run the longer your stride becomes (unless you are under striding) therefore there will be a greater degree of upper arm movement backwards and forwards (sagittal plane) since the increased speed of your legs will create greater rotational forces in your pelvis and shoulders which needs to be countered by your arms. This can be fine tuned by your choice of elbow angle. Some authorities suggest the elbows be held at 90º but if you look at elite level runners they have their elbows at a wide range of angles. Their choice may be influenced by running speed, the length of their arms in relation to their body, fatigue, comfort, personal preference, running on an incline / decline etc.
Allowing your hands to cross the midline of your body as you run increases the rotation in your torso and shoulders and may in fact overcompensate for the rotation that occurs as each leg goes forward. The arms should only counter trunk rotation to allow for pelvic and shoulder stability and the delivery of power to drive the legs; it should not cause torso rotation.
The focus should therefore be more on pulling the elbows back rather than the forward motion as this is where the rotational control comes from. Keep your shoulders relaxed and try not to lift your elbows sideways or swing your hands across the midline of your torso.